第三種電気主任技術者 機械ー誘導電動機3
誘導電動機の制御
始動法
Y-Δ始動法は、固定子の結線方法を始動時にY結線、回転数が上昇したらΔ結線と変えることで始動時には固定子コイルにかかる電圧を1/sqrt(3)にすることができ、始動電流を低減できる。 結線方法を変更するだけなのでスイッチのみでY-Δ始動法を実現できる。
しかし、始動トルクも1/3程度に低下してしまうというデメリットもある。また、動作中に結線方法を変更するので、一瞬電動機を空転させるので負荷が大きいと回転速度が一瞬低下してしまう。さらに結線方法を切り替えた後に再度比較的小さいが突入電流が流れてしまう。
そのため、>Y-Δ始動法は比較的小さい電動機で採用されている。
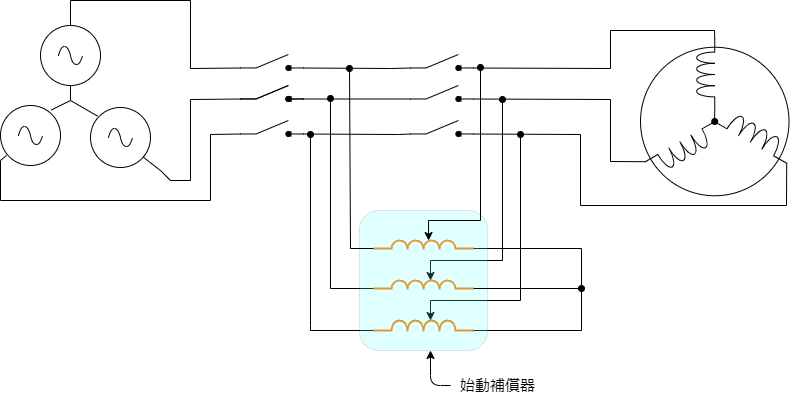
コンドルファ始動法(補償器始動法)は、始動補償器という三相単巻の変圧器を切り替えスイッチと並列で接続して、変圧器のタップ位置で始動電圧を徐々に上げることで始動電流を大きく抑えることができる。 始動電圧を1/2にすると始動電流、始動トルクは1/4にまで下がる。
始動補償器という専用の機器が必要でコストがかかり、始動トルクが小さいというデメリットがあるが、始動電流を大幅に抑えることができ、切り替え時の電圧差も小さいのでショックが小さくて済む。
誘導電動機の速度制御
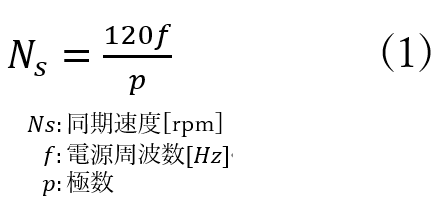
誘導電動機は下の式のように、同期速度とすべりに、極数によって回転速度が決まる。
 ]
]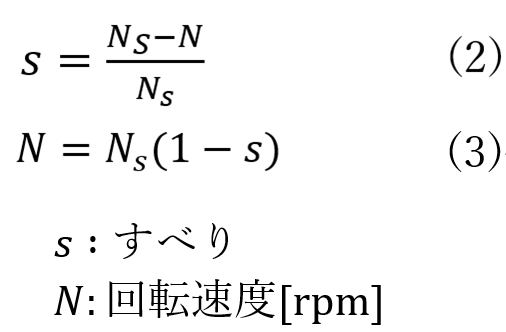
そのため、回転速度を制御するにはこれらのどれかを調整すればよい。
同期速度を調整する方法は、固定子コイルの電源周波数を変更する一次周波数制御。すべりを調整する方法は、一次電圧制御法。極数を調整する方法は極数変換法と呼ぶ。
一次周波数制御
同期速度を変えるために半導体(IGBT,FET)で周波数を変更して制御する方法。この周波数を変更する装置にはインバータ、サイリスタを用いたサイクロコンバータ、と呼ぶ。
一次周波数制御の中にもVVVF制御でV/fを一定に保つ制御と、ベクトル電流制御などがある。
VVVF制御(Variable Voltage Variable Frequency Control)
VVVF制御は可変電圧可変周波数制御のことで、一次周波数と電圧を同時に制御する方法。なぜ周波数だけでなく電圧も制御するかのか。それは、周波数を変更すると、電動機のインダクタンスも変化してしまうからだ。例えば電圧を一定にして周波数を小さくすると、インダクタンスも小さくなり、結果として電動機に流れる電流が大きくなってしまう。負荷トルクが大きくなったわけではないので、増加分の多くは熱になってしまい効率が悪い。
そのため、周波数を変化して速度制御する際に、効率を改善するために電圧と周波数を同時に変化させてV/fを一定に保つことで電流もあまり変わらなくなり、効率が改善される。
ベクトル電流制御
固定子が作る磁界と回転子に流れる2次電流が作る磁界それぞれの位置関係によって、固定子電流をトルクになる成分の電流(Iq)と、磁束を形成する成分の電流(Id)にベクトルで分けることができる。このIqとIdをそれぞれ制御する方式をベクトル電流制御と呼ぶ。電流を高速で制御することで、効率がよく滑らかな制御が可能になる。