2021-04-21 Raspberry pi Pico でKONDOサーボ(KRS-4034)を動かす Raspberry Pi Pico Raspberry Pi PicoからICS通信経由でKONDOサーボを動かしてみる。今回はIDの設定と角度指令を行う。構成はPasberryPi PicoのハードウェアシリアルをKONDOサーボの通信線に直接接続して通信をする。 続きを読む
2021-04-20 Raspberry Pi Pico でFutabaコマンドサーボRS304MDを動かす(VSC + C言語) Raspberry Pi Pico RaspberryPi PicoでPWMサーボを動かせるようになったので、コマンド通信でフタバコマンドサーボのRS304MDを動かしてみる。 続きを読む
2021-04-19 Raspberry Pi Pico PWMでRCサーボを動かす(windows10 + VSCode) Raspberry Pi Pico RaspberryPi Pico 前回は、Raspberry Pi PicoでPWMを出力できるようにしてLEDを調光したが、今回はソースコードを一部変更しRCサーボを動かせるようにする。Picoは16chのPWMがあるので、16個のRCサーボを接続して動かすことができる。 続きを読む
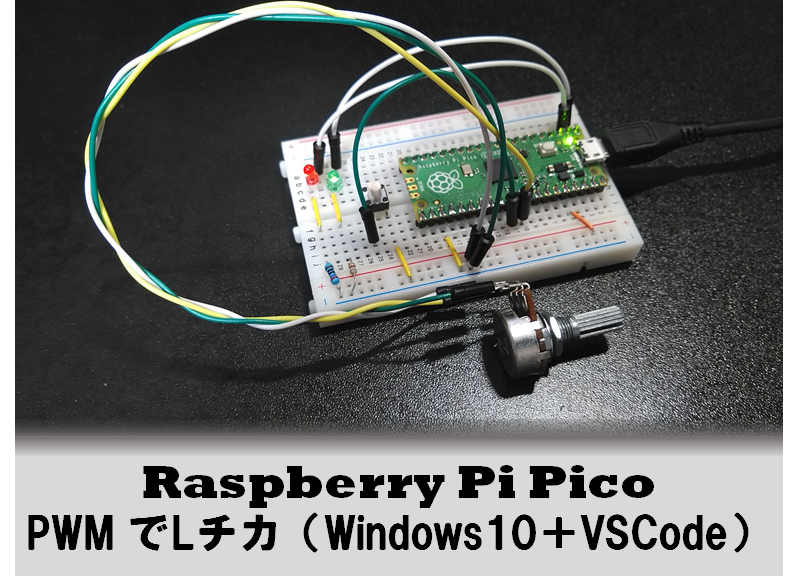
2021-04-18 Raspberry Pi PicoでPWMを出力する(windows10 + VSCode) Raspberry Pi Pico 今回はRaspberryPi PicoのハードウェアPWMを2本出力して、LEDをゆっくり点滅と可変抵抗で調光できるようにする。 続きを読む
2021-04-17 Raspberry pi Pico ADCを使う(Windows + VSCode) Raspberry Pi Pico 今回は、マイコン触りはじめの定番のADC(Analog to digital converter)を使用してみる。前回のタイマ割り込みのプロジェクトにADCの機能を追加実装する。 続きを読む
2021-04-16 Raspberry Pi Pico タイマ割り込みでLチカ(VSC + C言語) Raspberry Pi Pico 前回新しいプロジェクトを作成する方法がわかったので、今回はタイマ割り込みでLチカをしてみる。タイマ割り込みは色々な制御を行うので真っ先に抑えておきたい。またUSB経由でシリアルポートに文字を送ることも行う。新しいプロジェクトの場合printfの設定を行う必要がある。 続きを読む
2021-04-15 Raspberry Pi Pico Visual Studio Codeで新しいプロジェクトを作成して書き込む Raspberry Pi Pico 前回の記事ではGithubからクローニングしたサンプルのプロジェクトを開いてビルドして書き込んだが、それだけではオリジナルのプログラムを作るには面倒。 そのため今回は新しいフォルダでVisual Studio Codeプロジェクトを作成し、Cファイルを作成、ビルド、書込みj実行を一通り行う。 続きを読む